Français
FrançaisJournée FéDeV 2018 : Mardi 20 Novembre 2018

La journée s’est tenue à CentraleSupélec (bâtiment Bouygues, Amphithéâtre Peugeot), Université Paris-Saclay. Organisation : Maria Makarov, CentraleSupélec/L2S.
PROGRAMME
8h15 : Arrivée Organisateurs
8h45-9h00 : Accueil du Conseil de Fédération
9h00-10h00 : Réunion Conseil de Fédération
9h30-10h10 : Accueil public / Pause café
10h10 : Discours d’ouverture de la Journée FéDeV 2018
10h15-11h00 : Conférence plénière
« Stability, variability and predictability: Dynamic primitives in the control of complex actions » by Dagmar Sternad
Professor at the Departments of Biology, Electrical & Computer Engineering, and Physics
Northeastern University, Boston, USA
Abstract : Everyday behavior is a complex flow of actions, combining rhythmic and discrete movement elements and flexibly interacting with objects in the environment. In contrast to real-life behavior, research in human motor control has studied isolated, highly controlled experimental tasks, resulting in focused models that may not scale up to actions with full complexity. The premise of our research is that complex functional behaviors should be understood as the manifestation of a hierarchy of dynamic primitives, robust modules that overcome delays and noise in the neuromotor system and thereby simplify control. Discrete and rhythmic movements are generated by fixed-point and limit-cycle dynamics, attractors that are stable in the face of perturbations and that grant predictability, required for fast and complex actions; impedance is necessary to enable physical interactions. To test this framework, our research pursues both analytic and synthetic approaches using a suite of interactive skills as testbeds: from throwing and bouncing a ball to a target, to transporting a cup of coffee and cracking a whip. Starting with a model of the task that is implemented in a virtual environment, mathematical analyses of the task’s solution space create hypotheses for the experimental studies. Key concepts in our analysis are stability, variability, and predictability. Results show that humans develop skill by: 1) finding error-tolerant strategies that permit variability, 2) exploiting solutions with dynamic stability, 3) optimizing predictability of object dynamics. Simulations based on dynamic primitives generate critical features of these experimental findings. This framework can guide our understanding of pathological behaviors in clinical populations.
 Lien vers la vidéo de la conférence plénière : Dagmar Sternad
Lien vers la vidéo de la conférence plénière : Dagmar Sternad
11h00-11h45 : Conférence plénière
« Machine learning for robots to think fast in the face of unexpected events » by Aude Billard
Professor at the School of Engineering
Swiss Federal Institute of Technology (EPFL), Lausanne, Suisse.
Abstract : The next generation of robots will soon get out of the secure and predictable environment of factories and will face the complexity and unpredictability of our daily environments. To avoid that robots fail lamely at the task they are programmed to do, robots will need to adapt on the go. I will present techniques from machine learning to allow robots to learn strategies to enable them to react rapidly and efficiently to changes in the environment. Learning the set of feasible solutions will be preferred over learning optimal controllers. I will review methods we have developed to allow instantaneous reactions to perturbation, leveraging on the multiplicity of feasible solutions. I will present applications of these methods for compliant control during human-robot collaborative tasks and for performing fast motion in sport, such as when playing golf with moving targets.
 Lien vers la vidéo de la conférence plénière : Aude Billard
Lien vers la vidéo de la conférence plénière : Aude Billard
11h45-12h30: Table Ronde avec les conférencières invitées :
“Quels chemins vers une modélisation bio-inspirée du mouvement humain et des interactions sociales?”
Avec la participation de Thorsten Emig, Joint MIT-CNRS research laboratory (UMI) ; Isabelle Siegler, CIAMS, Univ Paris-Sud ; et de Maria Makarov, CentraleSupélec/L2S.
Lien vers la vidéo : Table Ronde
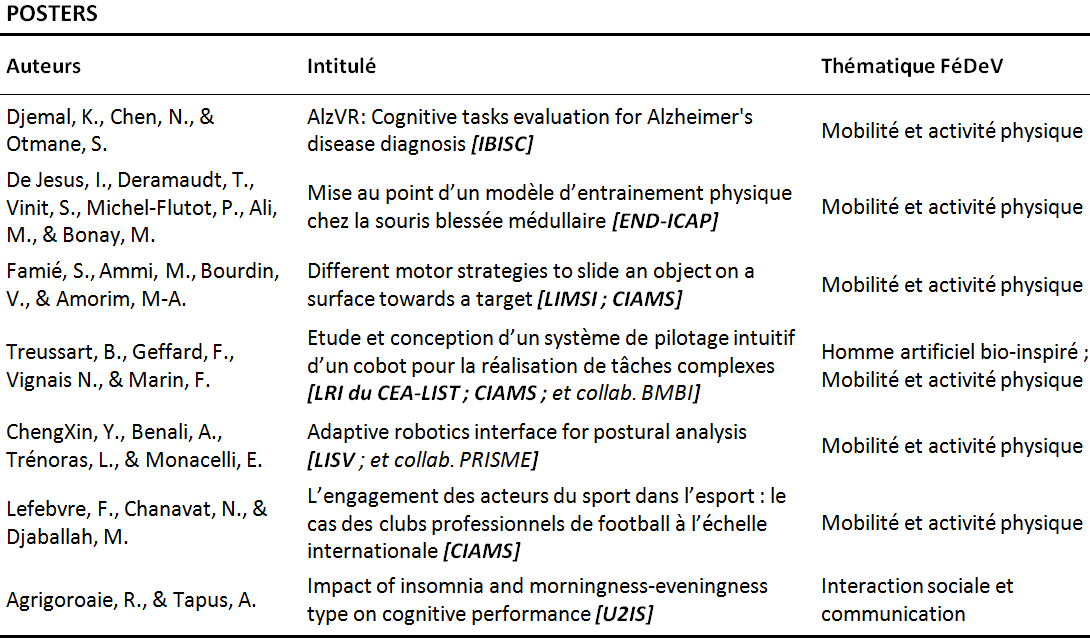
12h30 – 12h45 : Annonce des posters (« booster »)
12h45-14h15: Déjeuner-Buffet / Posters-Démos
14h15-16h00: Communications orales
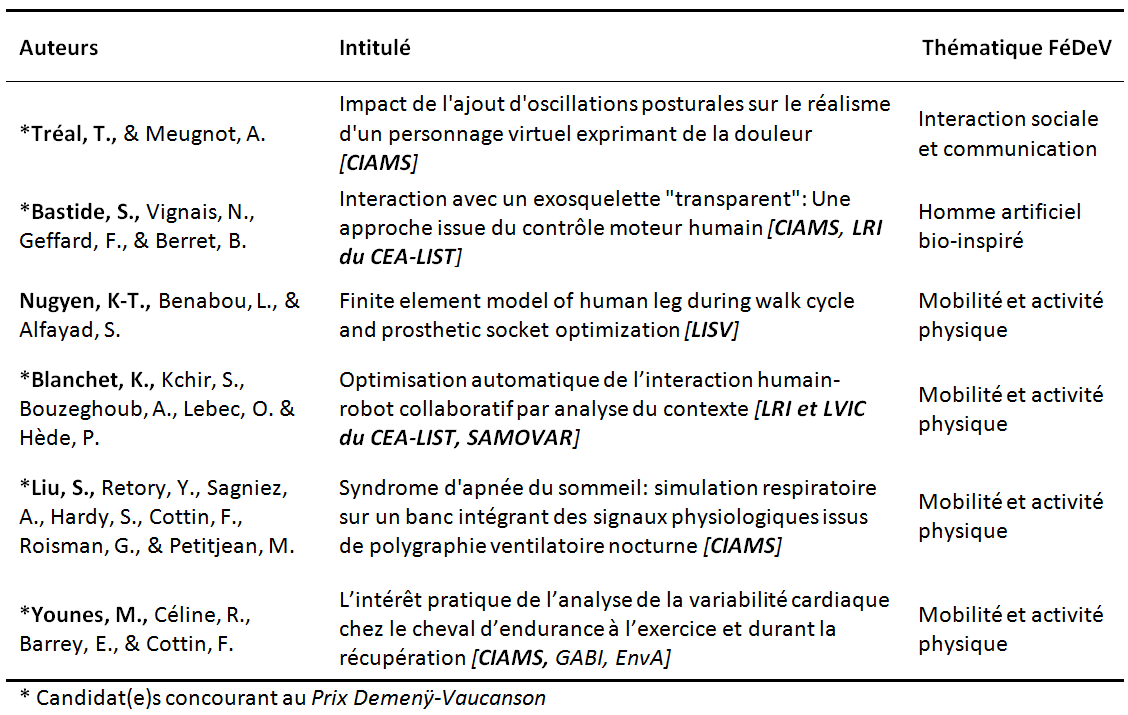
16h00-16h30: Pause café / Posters-Démos
16h00-16h30 : Réunion du Comité de Pilotage (Prix Demenÿ-Vaucanson)