Français
FrançaisJournée FéDeV 2016 : Mardi 18 Octobre 2016
La journée s’est tenue à l’Université d’Évry Val-d’Essonne, au bâtiment IBISC – IBGBI, 23, Boulevard de France, 91034 Evry.

PROGRAMME
8h15 : Arrivée Organisateurs
8h45-9h00 : Accueil du Conseil de Fédération
9h00-10h00 : Réunion Conseil de Fédération
9h30-10h10 : Accueil public / Pause café / Posters-Démos
10h10 : Discours d’ouverture de la Journée FéDEV 2016
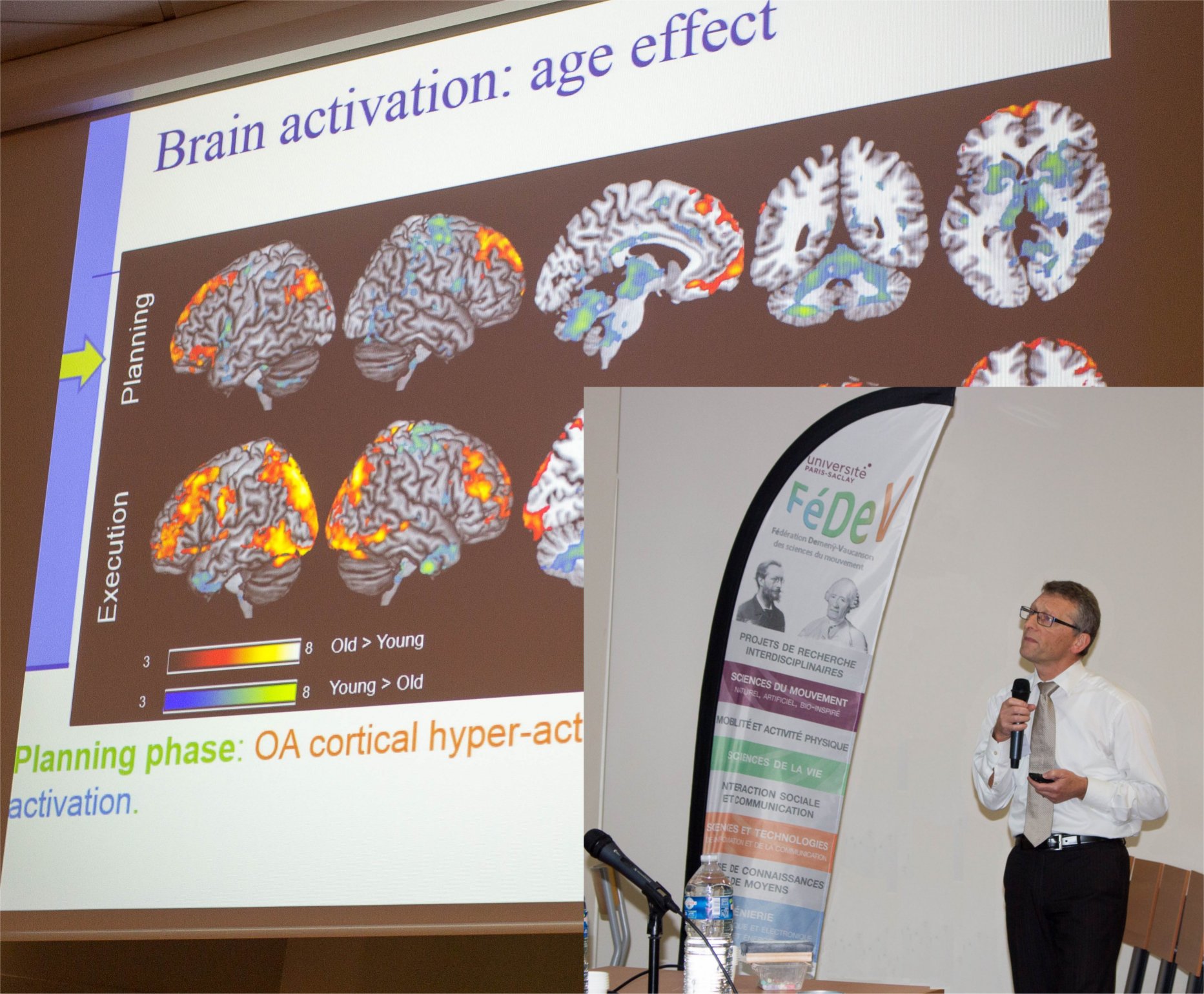
10h15-11h00 : Conférence plénière
« Neural control of bimanual movement and age-related effects » by Stephan Swinnen
Francqui Research Professor at KU Leuven
Motor Control Laboratory, Movement Control and Neuroplasticity Research Group
Abstract : Aging is not only associated with changes in cognitive function but also affects control of movement. Clinical as well as instrumented bimanual tasks demonstrate age-related changes in behavioral performance. Here, I will elaborate on the neural changes in movement control and learning as a function of aging. First, I will address how fMRI studies demonstrate changes in functional activation during task-related conditions in older as compared to young adults. I will elaborate on increased brain activation levels in older adults during production of bimanual coordination tasks and during skill acquisition. Second, I will discuss lifespan structural changes in brain grey and white matter. More specifically, associations between structural brain metrics and coordination behavior will be reported with a specific focus on the microstructural integrity of callosal connections. Finally, I will discuss age-related alterations in functional connectivity within the motor network during task-related and resting state conditions, as revealed by means of fMRI and/or TMS studies. The current systems level multimodal imaging approach appears promising in revealing lifespan alterations in brain and behavior, more specifically brain structure, function, and connectivity.

11h00-11h45 : Conférence plénière
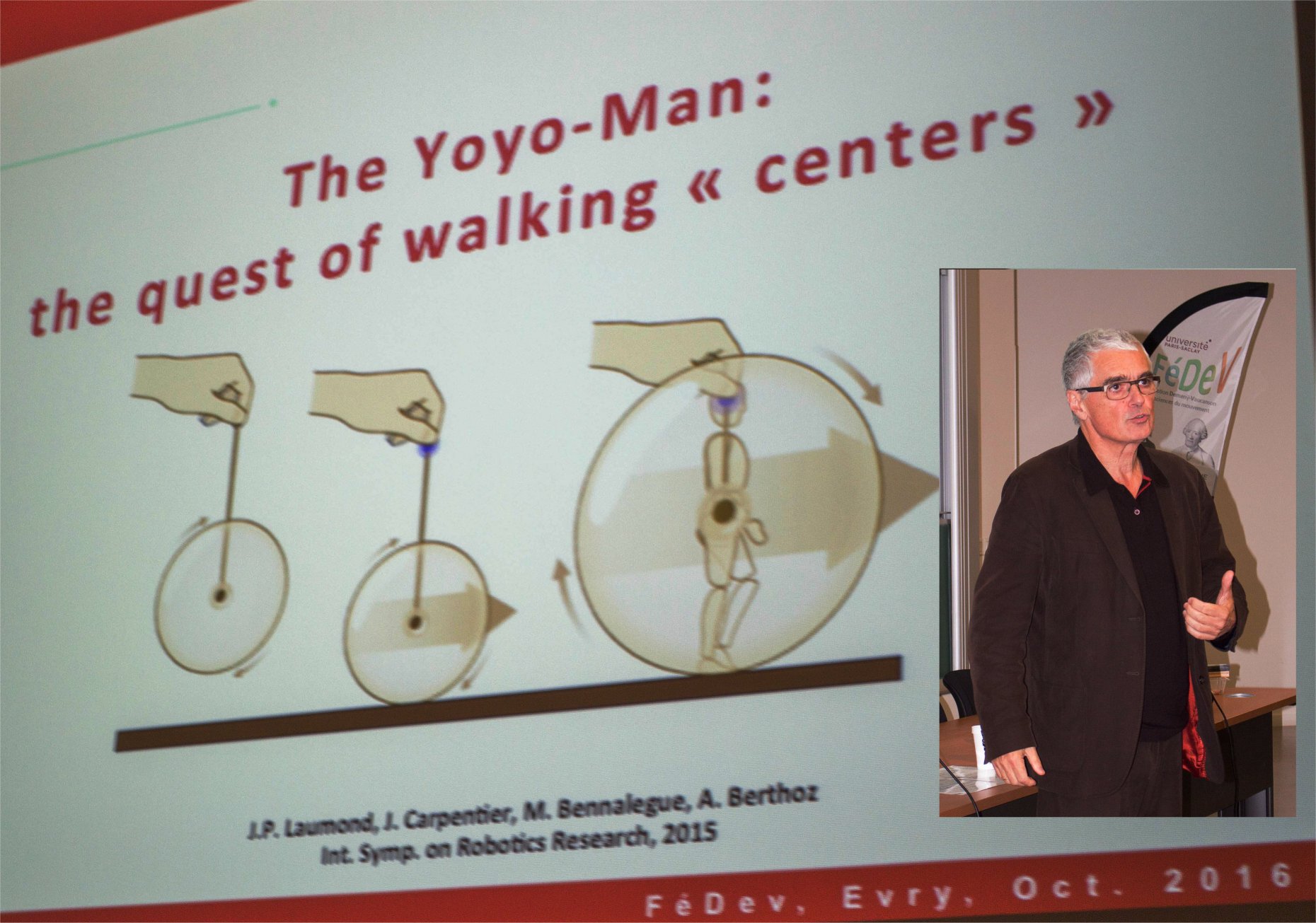
« The Yoyo-Man » by Jean-Paul Laumond
Directeur de Recherche au CNRS
Laboratoire d’analyse et d’architecture des systèmes (LAAS-CNRS), Toulouse
Abstract : The talk reports on two results issued from a multidisciplinary research action tending to explore the motor synergies of anthropomorphic walking. By combining biomechanics, neurophysiology and robotics perspectives, it is intended to better understand the human locomotion with the ambition to better design bipedal robot architectures. The motivation of the research starts from the simple observation that humans may stumble when following a simple reflex-based locomotion on uneven terrains. The rationale combines two well established results in robotics and neuroscience respectively:
– Passive robot walkers, which are very efficient in terms of energy consumption, can be modelled by a simple rotating rimless wheel;
– Humans and animals stabilize their head when moving.
The seminal hypothesis is then to consider a wheel equipped with a top-down control as a plausible model of bipedal walking. Two results comfort the hypothesis:
– From a motion capture data basis of twelve human walkers we first identify the center of mass (CoM) as a geometric center from which the motions of the feet are organized.
– After introducing a ground texture model that allows to quantify the stability performance of walker control schemes, we show how compass-like passive walkers are better controlled when equipped with a stabilized 2-degree-of-freedom moving mass on top of them.
CoM and head then play complementary roles that define what we call the Yoyo-Man. The model opens new perspectives to explore the computational foundations of anthropomorphic walking.

11h45-12h30: Table Ronde avec les conférenciers invités
sur la complémentarité SDV/STIC autour des questions de “computational neurorehabilitation”

Participants (de gauche à droite) :
Djamel Bensmail, PU-PH, Président de la Fondation Garches
UF Blessés Médullaires, Service de MPR, Pôle Handicap-Rééducation, Hôpital R. Poincaré (AP-HP), Equipe INSERM 1179, UVSQ.
Franck Geffard, Ingénieur chercheur, Expert senior du CEA-LIST
Laboratoire de Robotique Interactive (LRI)
Philippe Garrec, ingénieur-chercheur expert sénior en robotique au CEA LIST.
Animateur ISO Remote Handling for Nuclear Installations.
Jean-Paul Laumond
Lucie Hertz-Pannier, Directrice PhD-MD-HDR
UNIACT Neurospin CEA – INSERM UMR 1129-Univ. Paris Descartes
& Stephan Swinnen
12h30 – 12h45 : Annonce des posters (« booster »)
12h45-14h00: Déjeuner-Buffet / Posters-Démos
14h00-16h00: Communications orales
16h00-16h30: Pause café / Posters-Démos
16h00-16h30 : Réunion du Comité de Pilotage (Prix Demenÿ-Vaucanson)