
 Français
FrançaisJournée FéDeV 2021 : Jeudi 24 Juin 2021


La journée s’est tenue en mode hybride synchrone en présentiel dans l’amphi de la Faculté des Sciences du Sport de l’Université Paris-Saclay, et simultanément en distanciel par visioconférence.
Plus de photos de la Journée FéDeV 2021 sur ce lien
PROGRAMME
8h30 : Arrivée Organisateurs
8h45-9h00 : Accueil du Conseil de Fédération (Salle des Actes & visio)
9h00-10h00 : Réunion Conseil de Fédération (Salle des Actes & visio)
9h30-10h00 : Accueil public / Pause café
10h : Discours d’ouverture de la Journée FéDeV 2021
10h05-11h : Conférence plénière
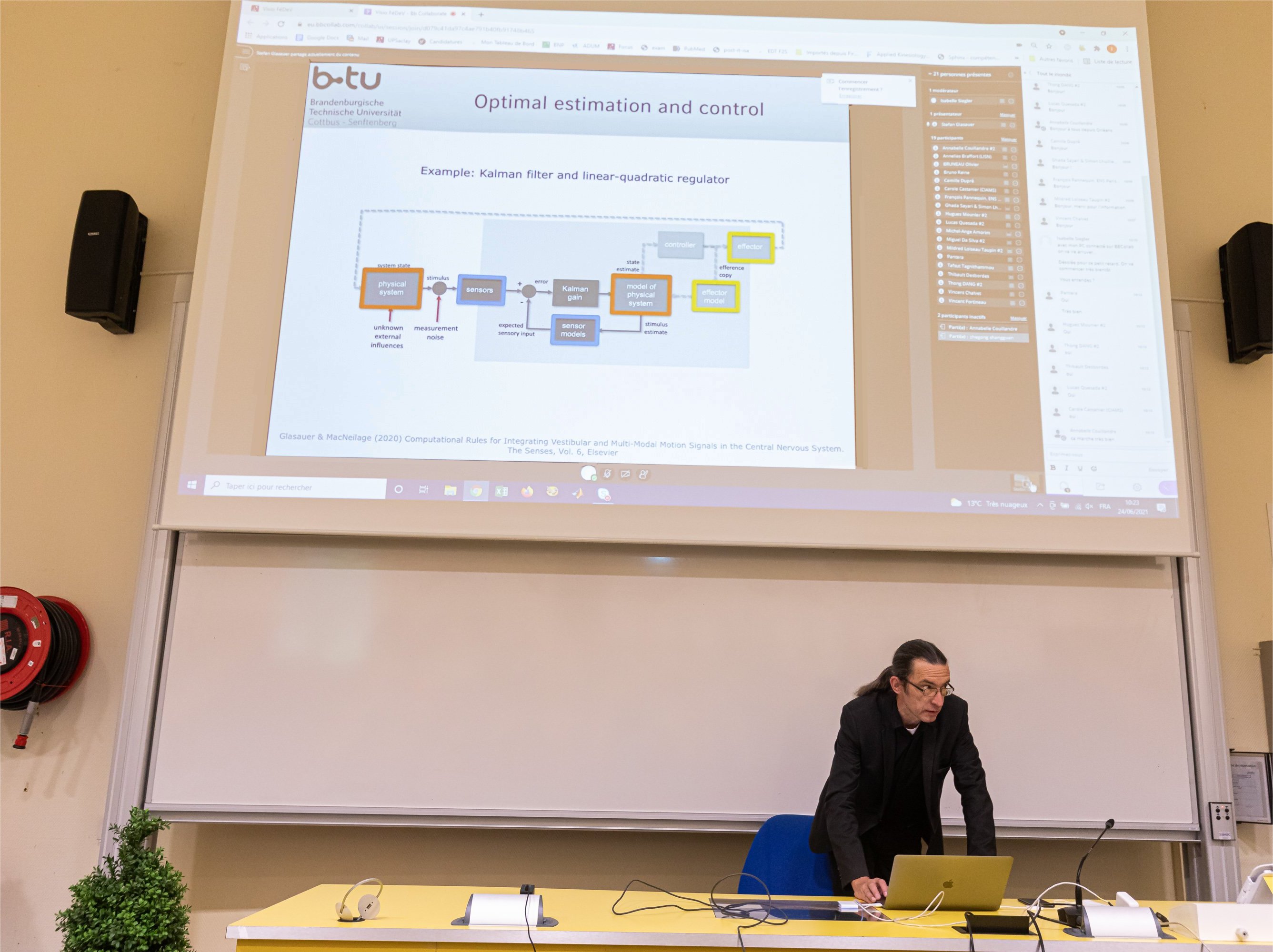
« Perception, action, and the role of internal models » by Stefan Glasauer
Full Professor, Dr.-Ing., Brandenburg University of Technology Cottbus – Senftenberg | BTU · Institute of Medical Technology, and Principal Investigator at the Bernstein Center for Computational Neuroscience
Abstract: Human perception not only relies on current sensory inputs but is a complement of varying extents of sensation and recollection, as Helmholtz put it about 150 years ago. Similarly, action is not just a reflex in response to a stimulus, but a complex process that depends on prior assumptions about the state of the body and the world. In computational terms, these processes can be described using the framework of probabilistic modelling, optimal estimation, and optimal control. A central aspect of this framework are internal models, which play a crucial role for perception and motor control. For the latter, a well-known concept are internal forward models, which predict the consequences of actions.
A less recognized type of internal models are so-called generative models that formulate hypotheses of how sensory stimuli are generated. However, it is precisely these generative models that allow making inferences about the causes of underlying sensations, the causes that constitute the content of perception.
In my talk I will discuss the role of internal models and show that probabilistic modelling can help understanding human motor control in health and disease as well as perception of space and time including its inter-individual differences. Finally, I’ll illustrate the limits of generalizing results from typical lab research to everyday life and suggest how we might be able to improve our experiments.


11h05-12h : Conférence plénière
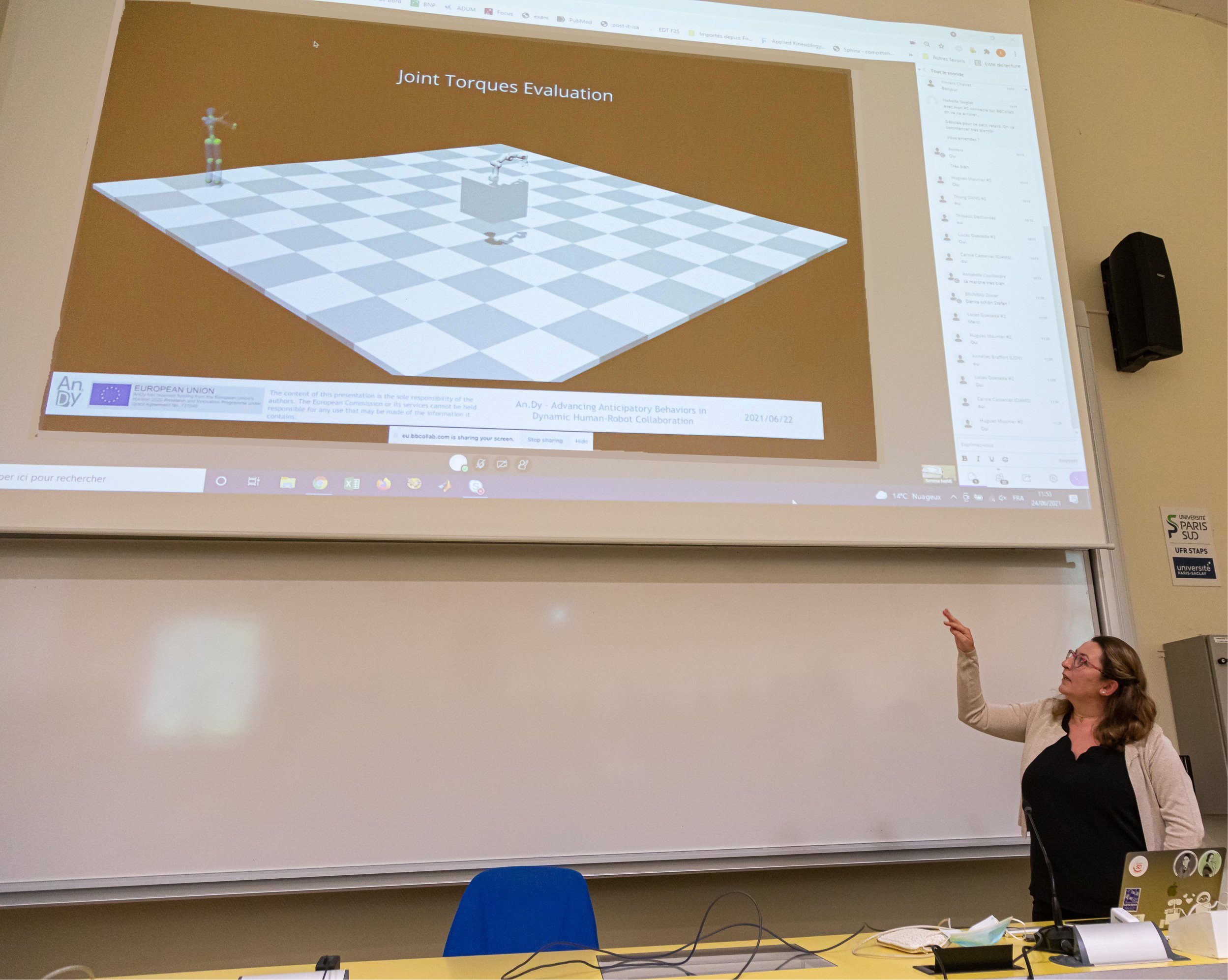
« Collaborative robotics technologies: lessons learned using wearable sensors for ergonomics, exoskeletons and tele-operation » by Serena Ivaldi
INRIA Researcher at the LORIA, in the Life-long Autonomy and interaction skills for Robots in a Sensing ENvironment (Larsen) team.
Abstract: From exoskeletons to cobots, collaborative robots are rapidly finding their use in the industrial domain, because of their ability to physically assist the humans in stressful and repetitive tasks. Combined with wearable sensors and artificial intelligence, they can help optimizing workstations and improving the ergonomics conditions of workers. Even humanoid robots are finding their place: as avatars, replacing the human operators in dangerous or remote environments. It is not intuitive, but this form of collaboration also requires an intelligent coupling between the human and the robot.
In this talk I will present our current projects developing collaborative technologies that are grounded on human motion tracking. The first consists in activity recognition and intention prediction, which are necessary for ergonomics evaluation and optimization of human movements. They are also used for humanoid teleoperation: in particular, not only the human movement is considered in the robot’s control, but also anticipated. Lastly, I will review our current work on exoskeletons, both in terms of evaluation and lessons learned from deployment of this solution in an hospital.


12h-12h30: Questions/réponses à nos deux conférenciers invités


12h30-14h : Déjeuner en extérieur // Posters
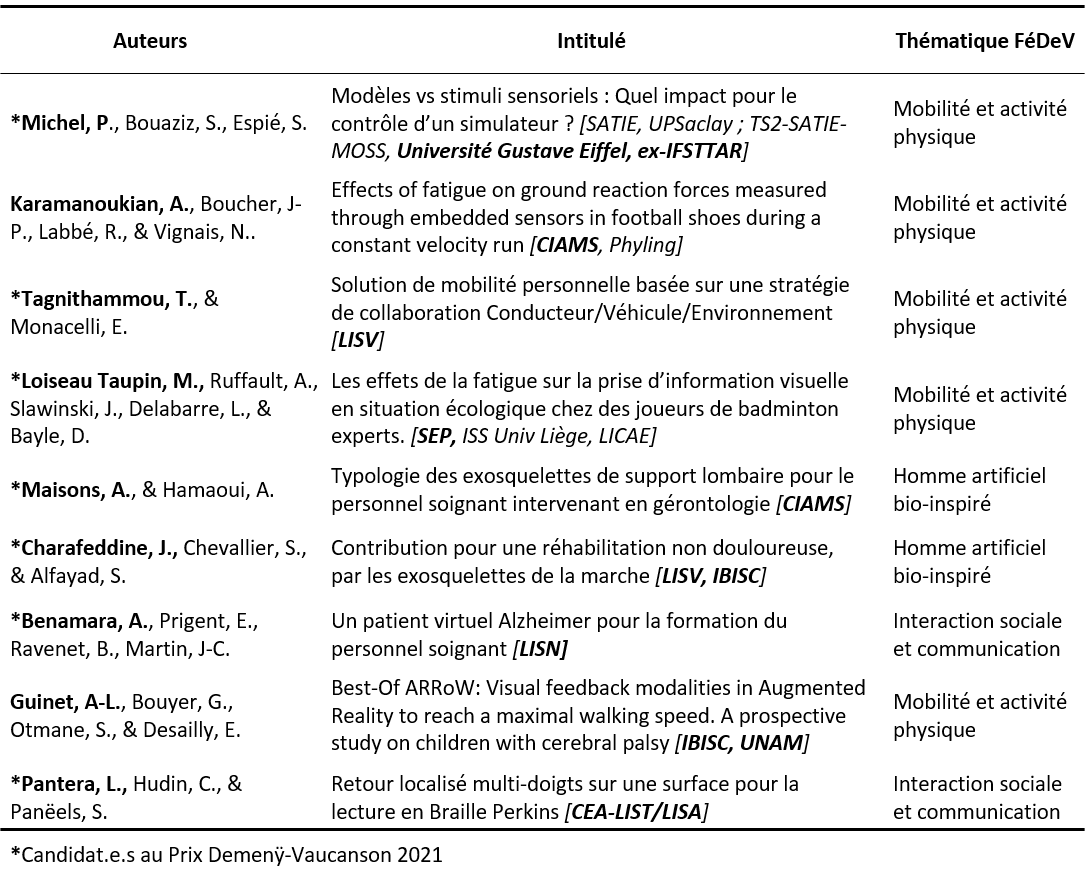
14h-16h30 : Communications orales FéDeV (doctorant.e.s et post-doc.s)
16h30-17h15 : Pause café / Posters
16h30-17h10 : Réunion du Comité de Pilotage (Prix Demenÿ-Vaucanson)