Français
FrançaisJournée FéDeV 2022 : Jeudi 13 Octobre 2022


La journée s’est tenue à ENSTA Paris | Institut Polytechnique de Paris
828 boulevard des Maréchaux, 91120 Palaiseau [plan]
PROGRAMME
8h30 : Arrivée Organisateurs
8h45 : Accueil public / Pause café
9h10 : Discours d’ouverture de la Journée FéDeV 2022
9h15-10h15 : Conférence plénière
 « Developmental Robotics for language learning, trust and Theory of Mind » by Angelo Cangelosi
« Developmental Robotics for language learning, trust and Theory of Mind » by Angelo Cangelosi
Professor of Machine Learning and Robotics at the University of Manchester, and Turing Fellow at the Alan Turing Institute, UK.
Abstract: Growing theoretical and experimental research on action and language processing and on number learning and gestures clearly demonstrates the role of embodiment in cognition and language processing. In psychology and neuroscience, this evidence constitutes the basis of embodied cognition, also known as grounded cognition. In robotics and AI, these studies have important implications for the design of linguistic capabilities in cognitive agents and robots for human-robot collaboration, and have led to the new interdisciplinary approach of Developmental Robotics, as part of the wider Cognitive Robotics field. During the talk we will present examples of developmental robotics models and experimental results from iCub experiments on the embodiment biases in early word acquisition and grammar learning and experiments on pointing gestures and finger counting for number learning. We will then present a novel developmental robotics model, and experiments, on Theory of Mind and its use for autonomous trust behavior in robots. The implications for the use of such embodied approaches for embodied cognition in AI and cognitive sciences, and for robot companion applications will also be discussed.
10h15-11h15 : Conférence plénière
 « From Active Inference to Empathy: combining a model of consciousness, artificial agents, and virtual reality to study the generation of behaviors » by David Rudrauf
« From Active Inference to Empathy: combining a model of consciousness, artificial agents, and virtual reality to study the generation of behaviors » by David Rudrauf
Junior Professor Chair “Cognitive, Affective and Social Generative Models and Behavioral Simulation for STAPS 2.0”, Université Paris-Saclay, and Projective Consciousness Robotics.
Abstract: My research program builds upon the Projective Consciousness Model, which combines active inference, free energy minimization, and a 3D projective geometrical model of the subjective perspective, in order to study and simulate human cognition and behavior. Interactive artificial agents are used as adaptive stimuli and to estimate human cognition parameters. We show how the approach can account for the integration of conscious perception, appraisal and motivation, both in terms of utility maximization (reward) and uncertainty reduction (curiosity), Theory of Mind (ToM), action programming, and the generation of adaptive and maladaptive behaviors. We illustrate the approach with simulations : in social robotics, demonstrating resilience, joint attention, social approach and avoidance, and the ability to take advantage of others’ false beliefs; and in virtual reality paradigms with performances entailing the ability to infer another agent’s ToM order and preferences. We briefly present collaborative experimental projects around these results, focusing on appraisal, empathy, and emotion regulation.
11h15-11h45 : Pause café / Posters
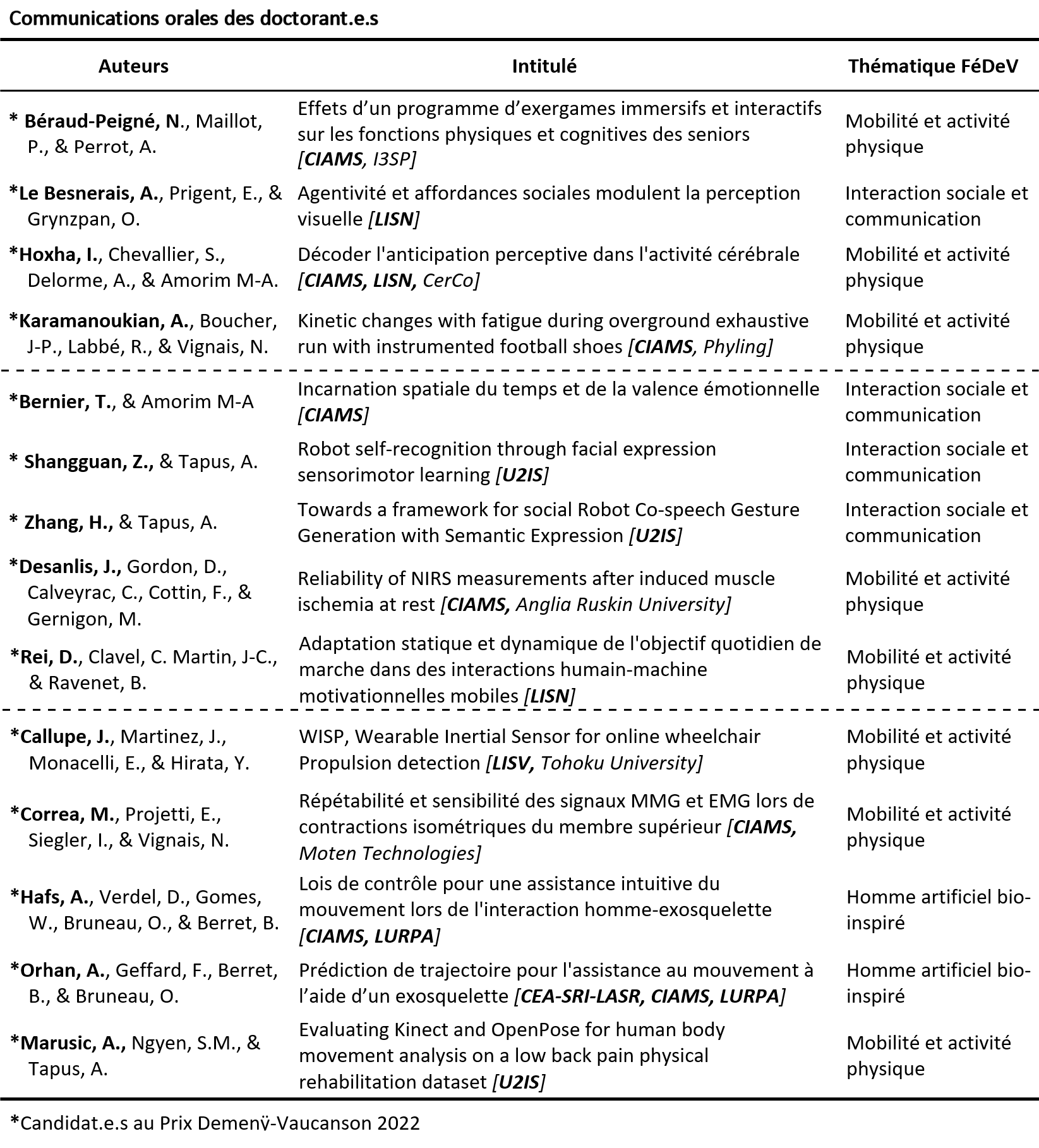
11h45-12h45 : 4 Communications orales de doctorant.e.s FéDeV
12h45-14h : Déjeuner // Posters
14h-15h30 : 5 Communications orales de doctorant.e.s FéDeV
15h30-16h : Pause café / Posters
16h-17h15 : 5 Communications orales de doctorant.e.s FéDeV
17h15 : Cocktail