Français
FrançaisJournée FéDeV 2023 : Mardi 10 Octobre 2023


La journée se tiendra à l’ENS Paris-Saclay
4 Avenue des Sciences 91190 Gif-sur-Yvette [plan]
Halle Emmy Noether : accueil, repas, pauses et posters
Amphithéâtre Dorothy Hogkins : conférences plénières et communications orales
Pour venir assister à la Journée FéDeV 2023, l’inscription est gratuite mais obligatoire.
L’inscription doit être faite sur le formulaire disponible à l’adresse suivante : INSCRIPTION
PROGRAMME
8h30 : Arrivée Organisateurs
8h45 : Accueil public / Pause café
9h10 : Discours d’ouverture de la Journée FéDeV 2023
9h15-10h15 : Conférence plénière
« Movement, Touch and Affective Technology: Opportunities in Physical Rehabilitation »
by Professor Nadia Berthouze
University College London Interaction Centre (UCLIC)
 Short Bio: Nadia Berthouze is a Full Professor in Affective Computing and Interaction at the University College London Interaction Centre (UCLIC). Her research focuses on designing technology that can sense the affective state of its users and use that information to tailor the interaction process. She has pioneered the field of Affective Computing by investigating how body movement and touch behaviour can be used as means to recognize and measure the quality of the user experience. Her work has been motivated by real-world applications such as physical rehabilitation (EPSRC Emo&Pain, H2020 EnTiMeMent), textile design (EPSRC Digital Sensoria, EPSRC Textile Circularity Centre), education (H2020 WeDraw) and wellbeing (EPSRC Intelligent Embodied Interaction; H2020 Human Manufacturing, EPSRC Embodied Intelligence). She has published more than 300 papers in Affective Computing, HCI, and Pattern Recognition.
Short Bio: Nadia Berthouze is a Full Professor in Affective Computing and Interaction at the University College London Interaction Centre (UCLIC). Her research focuses on designing technology that can sense the affective state of its users and use that information to tailor the interaction process. She has pioneered the field of Affective Computing by investigating how body movement and touch behaviour can be used as means to recognize and measure the quality of the user experience. Her work has been motivated by real-world applications such as physical rehabilitation (EPSRC Emo&Pain, H2020 EnTiMeMent), textile design (EPSRC Digital Sensoria, EPSRC Textile Circularity Centre), education (H2020 WeDraw) and wellbeing (EPSRC Intelligent Embodied Interaction; H2020 Human Manufacturing, EPSRC Embodied Intelligence). She has published more than 300 papers in Affective Computing, HCI, and Pattern Recognition.
Abstract: Physical rehabilitation is one of the most pressing global health needs, with disorders that affect engagement in everyday physical activities being one of the biggest burden worldwide. The analysis and modelling of human movement and touch behaviour can provide opportunities to not only gain insights into the impact of these conditions on daily living, but also enable the development of affective technology to support and facilitate physical rehabilitation. In this talk, I will present the lesson learnt from two case studies: chronic pain self-directed rehabilitation and occupational therapists training. I will first discuss how sensing body movement and touch can provide insights into the affective dynamics that take place during such activities and the barriers to overcome. I will also discuss how body sensing technology can be leveraged to support people by exploiting embodied bottom-up mechanisms that enhance the perception of one’s body and its capabilities.
10h15-11h15 : Conférence plénière
« Optimality principles in human movement and in human-robot interactions »
by Professor Katja Mombaur
Institute of Anthropomatics and Robotics, Optimization and Biomechanics for Human-Centred Robotics, Karlsruhe Institute of Technology, Karlsruhe, Germany; Canada Excellence Research Chair in Human Centred Robotics and Machine Intelligence, University of Waterloo, Waterloo, Canada
 Short Bio: Katja Mombaur is Full Professor and Chair for Optimization & Biomechanics for Human-Centred Robotics at Karlsruhe Institute of Technology in Germany, where she heads the KIT BioRobotics Lab. She also is Canada Excellence Research Chair (CERC) for Human-Centred Robotics & Machine Intelligence at the University of Waterloo in Canada. She holds a diploma degree in Aerospace Engineering from the University of Stuttgart and a Ph.D. degree in Mathematics from Heidelberg University and has worked as a researcher at Seoul National University and at LAAS-CNRS in Toulouse. Katja’s research focuses on understanding human movement by a combined approach of model-based optimization and experiments and using this knowledge to improve motions of humanoid robots and the design and human robot interactions of exoskeletons, prostheses and external mobility assistance devices. Her goal is to endow humanoid and wearable robots with motion intelligence that allow them to operate safely in a complex human world. She currently serves as ExCom secretary and Adcom member for the IEEE Robotics and Automation Society and has been elected as Vice President Member activities 2024-25.
Short Bio: Katja Mombaur is Full Professor and Chair for Optimization & Biomechanics for Human-Centred Robotics at Karlsruhe Institute of Technology in Germany, where she heads the KIT BioRobotics Lab. She also is Canada Excellence Research Chair (CERC) for Human-Centred Robotics & Machine Intelligence at the University of Waterloo in Canada. She holds a diploma degree in Aerospace Engineering from the University of Stuttgart and a Ph.D. degree in Mathematics from Heidelberg University and has worked as a researcher at Seoul National University and at LAAS-CNRS in Toulouse. Katja’s research focuses on understanding human movement by a combined approach of model-based optimization and experiments and using this knowledge to improve motions of humanoid robots and the design and human robot interactions of exoskeletons, prostheses and external mobility assistance devices. Her goal is to endow humanoid and wearable robots with motion intelligence that allow them to operate safely in a complex human world. She currently serves as ExCom secretary and Adcom member for the IEEE Robotics and Automation Society and has been elected as Vice President Member activities 2024-25.
Abstract: A fundamental understanding of human movement is interesting for many areas, for the treatment of medical conditions, to improve performance in sports, or to understand social cues and physical aspects in human interactions. But understanding human movement is also an important pre-requisite for human-centred robotics, such as humanoid or wearable robots. It is a common assumption that motions of humans and animals – similar to many other processes in nature – are performed in an optimal way due to evolution, learning and training. However, the particular criterion optimized is highly dependent on situation, the person and their adaptation level, and it often is a hybrid criterion combining multiple optimization goals.
In this talk, I will give an overview of some of our research on investigating optimality principles in human movement and human-robot interaction and how to use them to improve the design and control of robots. To mimic the optimizing property of nature, we formulate motions of humans, robots and their interactions as optimal control problems. An important component of this is a detailed description of the underlying physics in terms of subject-specific models of humans combined with precise models of the robotic systems and a particular focus on the interaction between both. Based on experimental studies of humans we use inverse optimal control to identify the underlying objective functions. I will present different examples of motions in sports and activities of daily living, and evaluating the effect of lower limb and spinal exoskeletons and of bio-inspired motions for humanoid robots acting alone and in interactions with humans.
11h15-12h15 : Pause café / Posters
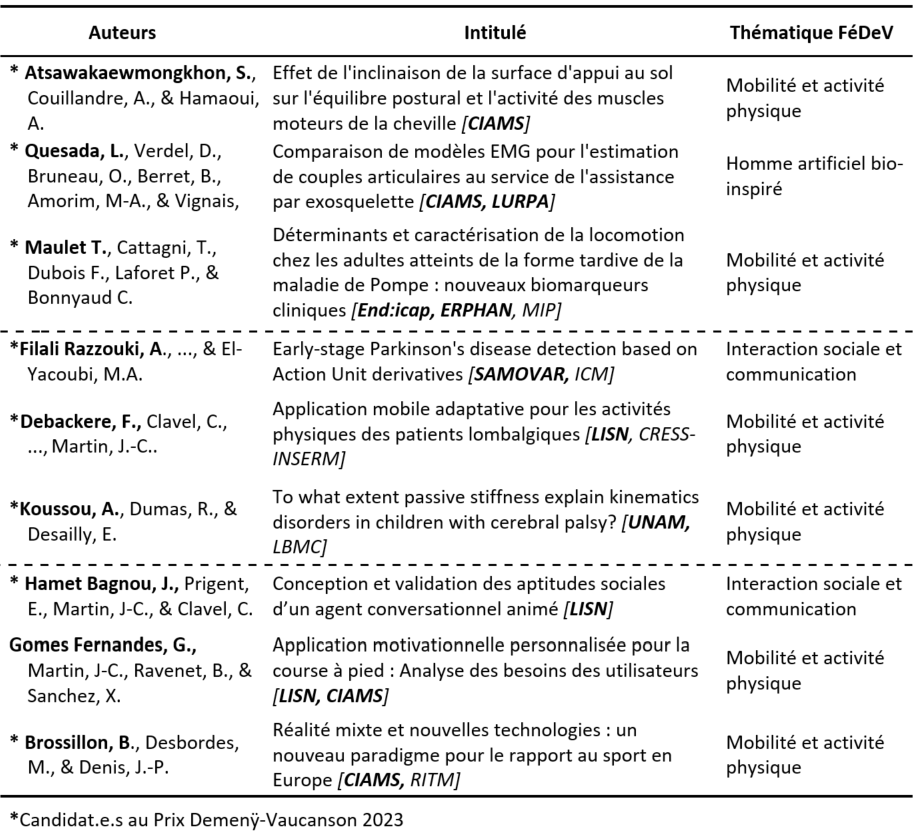
12h15-13h : 3 Communications orales de doctorant.e.s FéDeV
13h-13h15 : Poster Booster (1 min oral presentation per poster, no slide)
13h30-14h45 : Déjeuner // Posters
14h45-15h30 : 3 Communications orales de doctorant.e.s FéDeV
15h30-16h15 : Pause café / Posters
16h15-17h : 3 Communications orales de doctorant.e.s FéDeV
17h : Discours de clôture de la Journée FéDeV 2023