
 Français
Français
Co-animateurs/animatrices de l’axe : I. Siegler (CIAMS) ; D. Pradon (End:icap) ; M. Makarov (L2S) ; O. Bruneau (LURPA)
Les travaux scientifiques de cet axe visent à améliorer les technologies d’assistance à la personne (robotique d’assistance) ou des simulations du mouvement humain (modélisation et algorithmes de contrôle), en prenant en compte non seulement la biomécanique humaine (ex : robotique humanoïde), mais également les lois du contrôle moteur et du couplage perception-action de l’être humain. Il s’agit également d’utiliser les outils de simulation et les concepts issus de l’automatique et de la robotique pour concevoir, tester et valider des modèles du contrôle moteur humain en neurosciences intégratives.
Les principaux objectifs des trois thèmes de recherche détaillés ci-dessous ont pour objectif de :
- développer de nouveaux algorithmes de contrôle du mouvement bioinspiré et de simulation / prédiction du mouvement humain (Sous-thème n°1)
- développer de nouveaux actionneurs inspirés par le fonctionnement du muscle humain (Sous-thème n°2)
- développer de méthodes pour une interaction homme-robot physique plus intuitive, en améliorant d’une part la transparence de cobots ou des exosquelettes et d’autre part la sécurité de robots fonctionnant à proximité de l’homme. (Sous-thème n°3).
Sous-thème 1 : Modélisation et simulation de mouvements humains et humanoïdes (Modelling and simulation of human and humanoid motion)
PI : CIAMS (B. Berret, I. Siegler), L2S (M. Makarov, P. Rodriguez-Ayerbe), LURPA (O. Bruneau, G. Faraut), CEA-LIST (A. Micaelli), UNAM (Eric Desailly), IBISC (Vincent Vigneron, N. Séguy), TSP (B. Dorizzi)
Co-I : LISV (S. Alfayad)
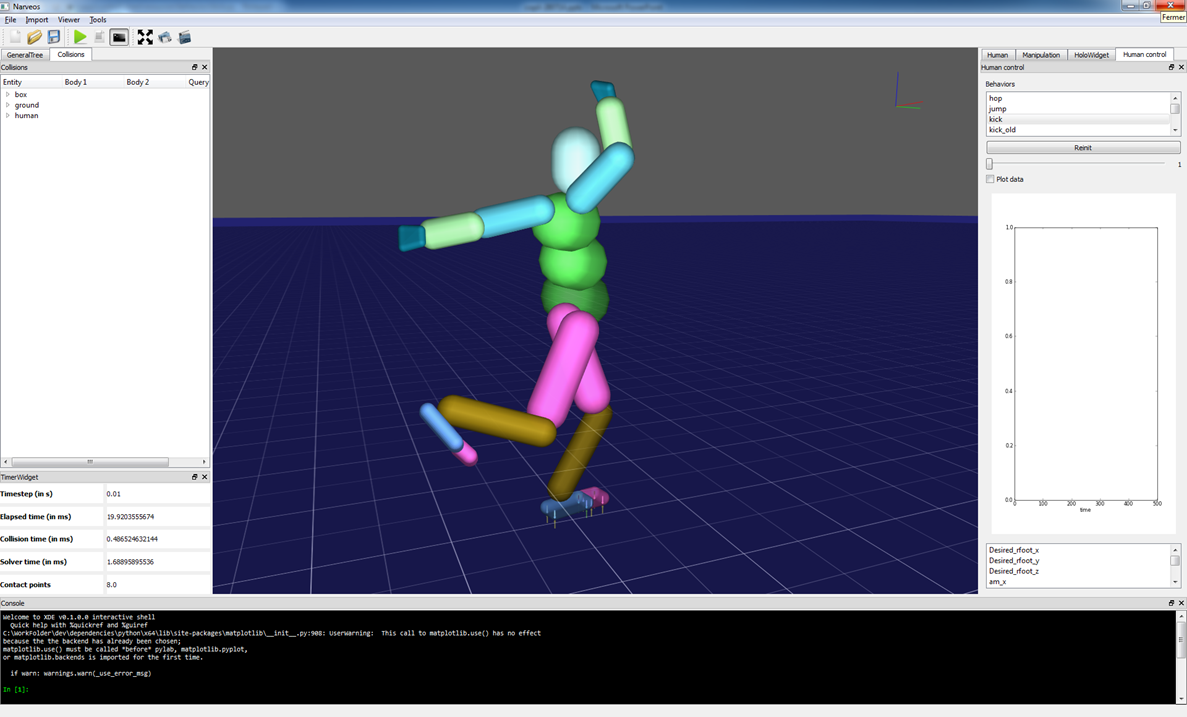
Le but de ce thème de recherche est de développer de nouveaux algorithmes de contrôle en s’inspirant des connaissances en neurosciences pour améliorer la simulation de différents types de mouvements, discrets ou rythmiques, et de rendre les mouvements simulés plus naturels. 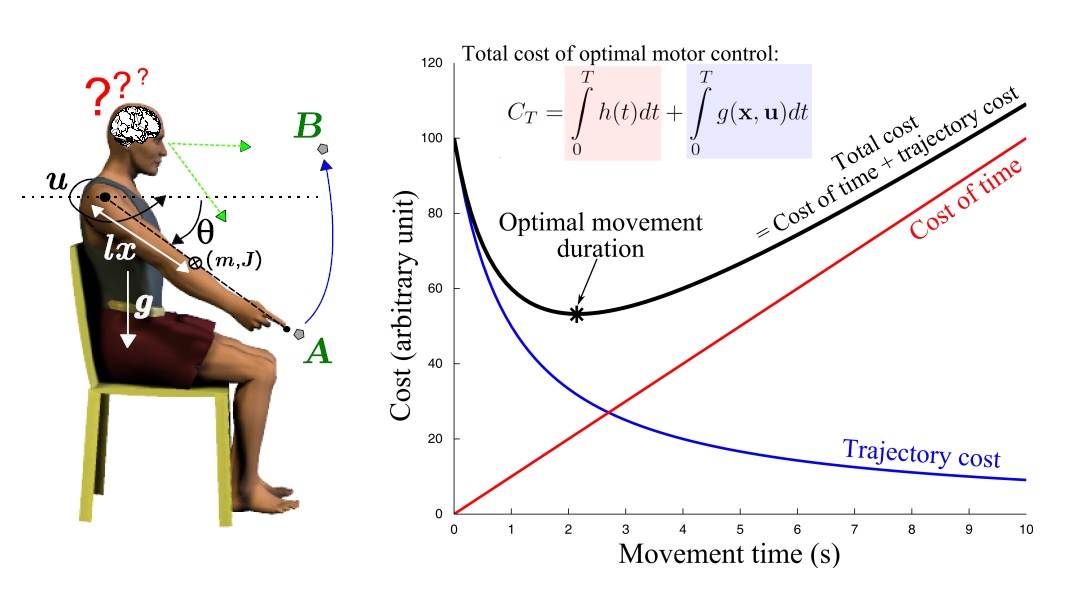 En effet, le cerveau humain est capable de faire des prédictions sur son état futur et sur les conséquences physiques et sensorielles de ses actions, de réduire la complexité du contrôle grâce à des synergies musculaires, de détecter des informations sensorielles les plus appropriées pour coordonner une action motrice dirigée vers un but et interagir avec son environnement. Inversement, le développement de nouveaux modèles et algorithmes vise également une meilleure compréhension des lois du contrôle moteur.
En effet, le cerveau humain est capable de faire des prédictions sur son état futur et sur les conséquences physiques et sensorielles de ses actions, de réduire la complexité du contrôle grâce à des synergies musculaires, de détecter des informations sensorielles les plus appropriées pour coordonner une action motrice dirigée vers un but et interagir avec son environnement. Inversement, le développement de nouveaux modèles et algorithmes vise également une meilleure compréhension des lois du contrôle moteur.
Un autre enjeu est d’optimiser les nouveaux algorithmes pour qu’ils puissent opérer en temps réel.
Enfin, dans ce sous-thème de recherche d’axe, il s’agit aussi de développer des outils de simulation pour prédire les conséquences des chirurgies orthopédiques destinées à améliorer la locomotion des enfants atteints de paralysie cérébrale sur les paramètres du mouvement post-opératoire (ex : cinématique de marche), et ce de façon quantitative et non pas seulement qualitative. Ce projet participe d’une perspective d’optimisation de la décision chirurgicale.
Sous-thème 2 : Actionneurs biologiques et artificiels (Biological and artificial actuators)
PI : LISV (S. Alfayad), CEA-LIST (Ph. Garrec), ENDiCAP (D. Pradon, N. Roche)
Co-I : L2S (S. Tliba)
Ce thème de recherche vise à développer de nouveaux actionneurs capables de reproduire des propriétés des muscles humains. Il s’agit d’une problématique fondamentale puisque la plupart des capacités d’adaptation et des propriétés de compliance du corps humain proviennent des propriétés intrinsèques des muscles. Concevoir de nouveaux systèmes intégrant des actionneurs bio-inspirés pourrait faciliter le transfert de principes du contrôle moteur humain vers les systèmes robotiques, facilitant ainsi la coopération homme-robot.
Dans ce contexte, nous nous intéressons à la conception et la commande d’un actionneur électrohydraulique intégré (IEHA) ayant les caractéristiques suivantes : un grand rapport puissance-masse, une haute efficacité énergétique, la capacité de changer rapidement ses propriétés intrinsèques telles que la raideur et l’amortissement afin de permettre à l’articulation actionnée à être successivement totalement active, plus ou moins souples ou entièrement passive. L’existence d’un signal de commande (activation) pour modifier le débit (vitesse) et la pression (force) produite par l’actionneur fait de la solution brevetée un bon candidat pour reproduire la force en fonction du déplacement et de la vitesse comme il se produit dans un muscle biologique. L’objectif intermédiaire consistera à améliorer ce nouvel actionneur pour reproduire les propriétés des muscles humains à travers ses caractéristiques de raideur ajustable, le signal d’activation, la production de force passive et active.
Sous-thème 3 : Interactions physiques homme-robot (Physical human-robot interactions)
PI : CEA-LIST (F. Geffard), L2S (S. Tliba), LISV (S. Alfayad)
Co-I : LURPA (O. Bruneau), L2S (M. Makarov, P. Rodriguez-Ayerbe)
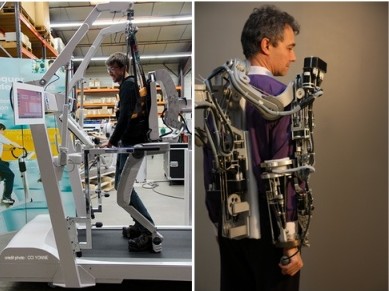
Ce sujet se focalise sur le développement de méthodes pour une interaction homme-robot physique plus intuitive. Les systèmes impliqués dans l’interaction physique homme-robot incluent des robots portables (par exemple exosquelette robotique), conçus pour augmenter les capacités physiques ou assister les êtres humains, ou des structures robotiques plus traditionnelles (bras manipulateur) utilisées pour la cobotique ou l’assistance.
- Pour les robots portables de type exosquelette ou la cobotique, l’une des caractéristiques essentielles est la transparence, c’est-à-dire la capacité du robot à s’adapter aux mouvements humains sans gêner ceux-ci. Une façon d’améliorer la transparence est de détecter l’intention de l’utilisateur, à partir par exemple des modèles musculaires et des synergies. Dans ce contexte, l’évaluation du degré d’adaptation des utilisateurs à un exosquelette déjà conçu (qui pourrait se traduire par le développement de nouvelles synergies musculaires) constitue également une piste de recherche.
- En robotique plus traditionnelle et ses récents développements vers une assistance robotique en interaction physique avec des humains, la sécurité reste une problématique fondamentale. Dans ce contexte, les algorithmes de détection de collision entre le robot et son environnement en présence d’incertitudes de modélisation et en utilisant un nombre minimal de capteurs, ainsi que des stratégies de commande post-impact appropriées sont étudiées [PROJET COCORO L2S/CEA-LIST].
Références bibliographiques :
E. Burdet (2013) Human Robotics: neuromechanics and motor control





